Welcome to FLYBO!
A Unified Benchmark Environment for Autonomous Flying Robots
Overview
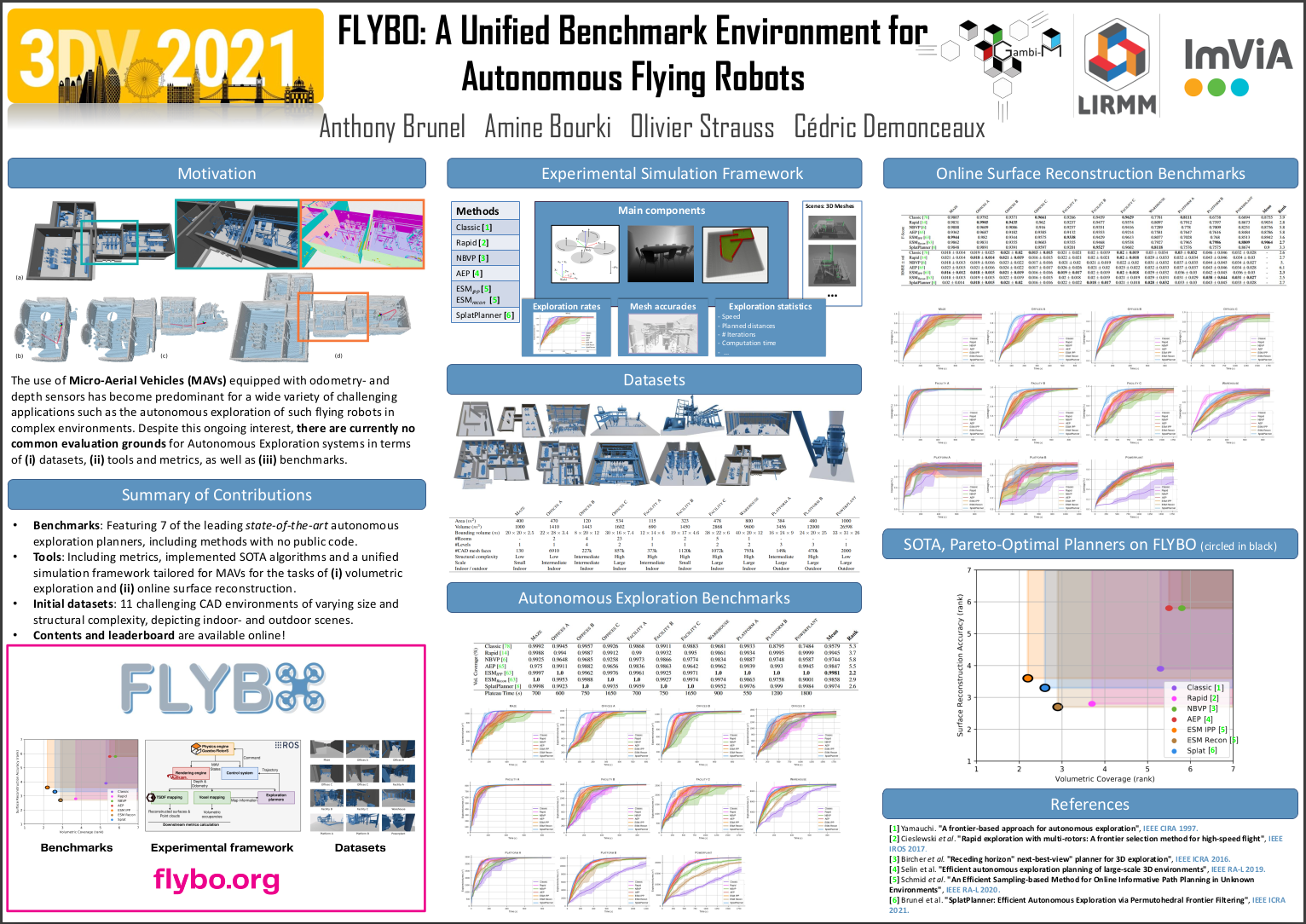
The use of Micro-Aerial Vehicles (MAVs) equipped with odometry- and depth sensors has become predominant for a wide variety of challenging industrial applications such as the autonomous exploration (ie, digital mapping), and inspection (ie, online surface reconstruction) of unknown facilities. However, despite the ongoing attention these topics receive, autonomous exploration systems still lack common evaluation grounds to assess their relative performance in terms of data and experimental tools.
We address this deficit by introducing FLYBO, the first unified benchmark environment that focuses on the performance of such flying robots in terms of autonomous exploration and online surface reconstruction.
FLYBO includes the following contents:
(i) a comprehensive benchmark of 7 of the top-performing autonomous exploration algorithms including methods without publicly available code.
(ii) A unified experimental system factorizes the routines shared by autonomous planners in order to fairly and accurately assess their exploration performance in a controlled environment.
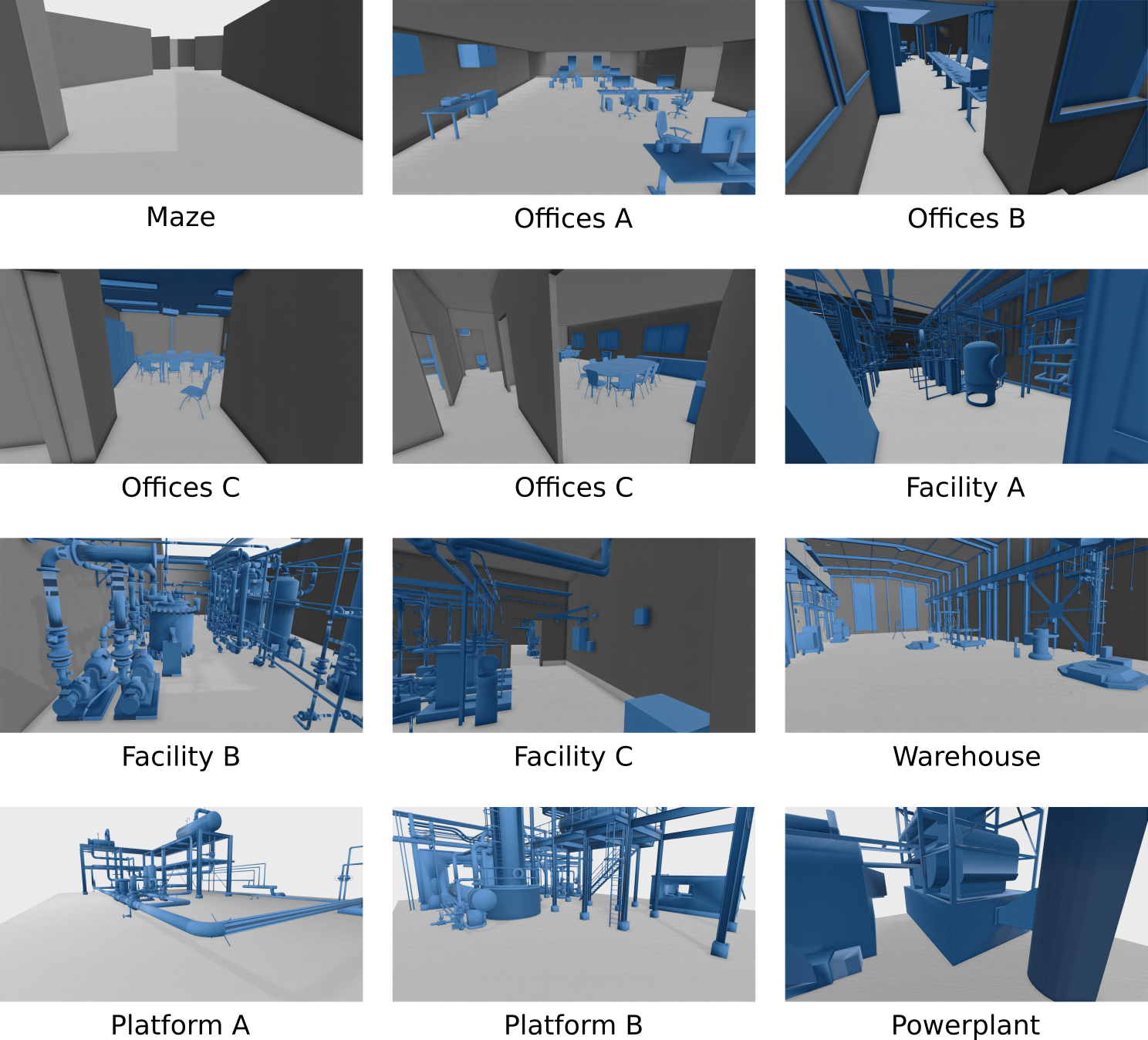
(iii) 11 challenging realistic indoor- and outdoor datasets of increasing complexity and size, with ground-truth.
News
- (New!) 12/01/2021: The datasets are now available in the Download section!
- (New!) 12/01/2021: Our benchmarking system is now available online on our github page and our Download section! This includes three planners for now: (i) SplatPlanner, (ii) Classic and (iii) Rapid frontier-based systems!
- (New!) 12/01/2021: The supplementary material as well as our poster are now available for download!
- 10/20/2021: The website in its first iteration is now online!